Problem Statement
What is the shape of a uniform chain or cable of length \(L\) hanging between two fixed points under the influence of gravity alone? This is known as the catenary problem.
Physical Setup

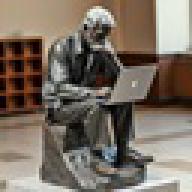
Consider a chain hanging between two points. We’ll set up coordinates so that:
- The \(x\)-axis is horizontal
- The \(y\)-axis points vertically upward
- The chain has uniform linear mass density \(\rho\) (mass per unit length)
- The chain has fixed length \(L\)
- The supports are located symmetrically at \(x = \pm x_0\)
- The sag \(h\) is the vertical distance from the support level to the lowest point of the chain
We want to find the function \(y(x)\) that describes the shape of the chain.
Variational Formulation
The chain will hang in the shape that minimizes its gravitational potential energy, subject to the constraint that it has fixed length \(L\).
The potential energy of the chain is:
\[U = \int \rho g y \, ds = \rho g \int y\sqrt{1 + (y')^2} \, dx\]where \(ds = \sqrt{1 + (y')^2}dx\) is the arc length element.
The total length constraint is:
\[L = \int \sqrt{1 + (y')^2} \, dx\]Why do we need Lagrange multipliers?
This is a constrained optimization problem. We want to minimize the potential energy \(U\), but we can’t just set \(\frac{\delta U}{\delta y} = 0\) and solve, because not all functions \(y(x)\) are allowed—only those that satisfy the constraint that the total arc length equals \(L\).
In standard calculus, if we want to minimize \(f(x,y)\) subject to \(g(x,y) = c\), we use Lagrange multipliers because:
- The unconstrained minimum of \(f\) might not satisfy the constraint
- At the constrained minimum, the gradients of \(f\) and \(g\) must be parallel: \(\nabla f = \lambda \nabla g\)
The same principle applies to the calculus of variations. We’re minimizing a functional \(U[y]\) subject to a constraint functional \(L[y] = \text{constant}\). The Lagrange multiplier \(\lambda\) ensures that, among all possible curves of length \(L\), we find the one that minimizes potential energy.
To minimize \(U\) subject to the constraint, we form the augmented functional:
\[I = \int [\rho g y\sqrt{1 + (y')^2} + \lambda\sqrt{1 + (y')^2}] \, dx\]\[I = \int (\rho g y + \lambda)\sqrt{1 + (y')^2} \, dx\]
Let’s define the integrand (Lagrangian):
\[\mathcal{L}(x, y, y') = (\rho g y + \lambda)\sqrt{1 + (y')^2}\]Applying the Euler-Lagrange Equation
The Euler-Lagrange equation is:
\[\frac{\partial \mathcal{L}}{\partial y} - \frac{d}{dx}\left(\frac{\partial \mathcal{L}}{\partial y'}\right) = 0\]To apply this equation, we need to compute the required partial derivatives. First, we have:
\[\frac{\partial \mathcal{L}}{\partial y} = \rho g\sqrt{1 + (y')^2}\]Next, we calculate:
\[\frac{\partial \mathcal{L}}{\partial y'} = (\rho g y + \lambda) \cdot \frac{y'}{\sqrt{1 + (y')^2}}\]The most involved calculation is the derivative with respect to \(x\), which requires the product rule and chain rule:
\[\frac{d}{dx}\left(\frac{\partial \mathcal{L}}{\partial y'}\right) = \frac{d}{dx}\left[(\rho g y + \lambda) \cdot \frac{y'}{\sqrt{1 + (y')^2}}\right]\]Let’s compute this step by step:
\[= (\rho g y' + \lambda \cdot 0) \cdot \frac{y'}{\sqrt{1 + (y')^2}} + (\rho g y + \lambda) \cdot \frac{d}{dx}\left[\frac{y'}{\sqrt{1 + (y')^2}}\right]\]The second term involves:
\[\frac{d}{dx}\left[\frac{y'}{\sqrt{1 + (y')^2}}\right]\]Using the quotient rule \(\frac{d}{dx}\left[\frac{u}{v}\right] = \frac{u'v - uv'}{v^2}\) with \(u = y'\) and \(v = \sqrt{1 + (y')^2}\):
First, we need:
- \(u = y'\), so \(u' = y''\)
- \(v = \sqrt{1 + (y')^2}\), so \(v' = \frac{y'y''}{\sqrt{1 + (y')^2}}\)
Applying the quotient rule:
\[\frac{d}{dx}\left[\frac{y'}{\sqrt{1 + (y')^2}}\right] = \frac{y'' \cdot \sqrt{1 + (y')^2} - y' \cdot \frac{y'y''}{\sqrt{1 + (y')^2}}}{(\sqrt{1 + (y')^2})^2}\]\[= \frac{y''\sqrt{1 + (y')^2} - \frac{(y')^2 y''}{\sqrt{1 + (y')^2}}}{1 + (y')^2}\]Multiplying numerator and denominator by \(\sqrt{1 + (y')^2}\):
\[= \frac{y''(1 + (y')^2) - (y')^2 y''}{(1 + (y')^2)^{3/2}} = \frac{y''[1 + (y')^2 - (y')^2]}{(1 + (y')^2)^{3/2}} = \frac{y''}{(1 + (y')^2)^{3/2}}\]So:
\[\frac{d}{dx}\left(\frac{\partial \mathcal{L}}{\partial y'}\right) = \frac{\rho g (y')^2}{\sqrt{1 + (y')^2}} + \frac{(\rho g y + \lambda)y''}{(1 + (y')^2)^{3/2}}\]Now setting ∂\(\mathcal{L}\)/∂y - d/dx(∂\(\mathcal{L}\)/∂y’) = 0:
\[\rho g\sqrt{1 + (y')^2} - \frac{\rho g (y')^2}{\sqrt{1 + (y')^2}} - \frac{(\rho g y + \lambda)y''}{(1 + (y')^2)^{3/2}} = 0\]Multiplying through by \(\sqrt{1 + (y')^2}\):
\[\rho g(1 + (y')^2) - \rho g(y')^2 - \frac{(\rho g y + \lambda)y''}{(1 + (y')^2)} = 0\]\[\rho g - \frac{(\rho g y + \lambda)y''}{(1 + (y')^2)} = 0\]\[\rho g = \frac{(\rho g y + \lambda)y''}{(1 + (y')^2)}\]\[y'' = \frac{\rho g(1 + (y')^2)}{(\rho g y + \lambda)}\]Let’s define \(a = -\lambda/(\rho g)\) (a constant with units of length). Then:
\[\boxed{y'' = \frac{1 + (y')^2}{y - a}}\]This is a nonlinear second-order ordinary differential equation (ODE). To solve it, we use the substitution \(p = y'\), so \(y'' = p \frac{dp}{dy}\). This is a powerful technique for solving certain second-order ODEs. Here’s why it works:
If we let \(p = y' = \frac{dy}{dx}\), then we need to express \(y''\) in terms of \(p\) and its derivatives.
Using the chain rule:
\[y'' = \frac{d}{dx}\left(\frac{dy}{dx}\right) = \frac{dp}{dx}\]But we can also write \(\frac{dp}{dx}\) using the chain rule:
\[\frac{dp}{dx} = \frac{dp}{dy} \cdot \frac{dy}{dx} = \frac{dp}{dy} \cdot p\]Therefore: \(y'' = p \frac{dp}{dy}\)
This substitution is particularly useful when the original ODE doesn’t contain \(x\) explicitly, as in our case. It reduces the second-order ODE in \(y(x)\) to a first-order ODE in \(p(y)\).
Applying this to our equation:
\[p \frac{dp}{dy} = \frac{1 + p^2}{y - a}\]Separating variables:
\[\frac{p\,dp}{1 + p^2} = \frac{dy}{y - a}\]Integrating both sides:
\[\int \frac{p\,dp}{1 + p^2} = \int \frac{dy}{y - a}\]\[\frac{1}{2}\ln(1 + p^2) = \ln(y - a) + C_1\]Taking exponentials and rearranging:
\[\ln(1 + p^2) = 2\ln(y - a) + 2C_1\]\[1 + p^2 = e^{2C_1}(y - a)^2\]
\[\sqrt{1 + p^2} = C_2(y - a)\]
where \(C_2\) is a positive constant. Here \(C_1\) is the constant of integration from the previous step. From \(1 + p^2 = e^{2C_1}(y - a)^2\) and \(\sqrt{1 + p^2} = C_2(y - a)\), we get \(C_2^2 = e^{2C_1}\), so \(C_2 = e^{C_1}\).
Since \(p = \frac{dy}{dx}\):
\[\sqrt{1 + \left(\frac{dy}{dx}\right)^2} = C_2(y - a)\]Solving for \(\frac{dy}{dx}\):
\[\frac{dy}{dx} = \pm\sqrt{C_2^2(y - a)^2 - 1}\]Separating variables again:
\[\frac{dy}{\sqrt{C_2^2(y - a)^2 - 1}} = dx\]Let \(u = C_2(y - a)\), so \(du = C_2\,dy\), and \(dy = \frac{du}{C_2}\):
\[\frac{1}{C_2} \int \frac{du}{\sqrt{u^2 - 1}} = \int dx\]The left integral is \(\cosh^{-1}(u)\):
\[\frac{1}{C_2} \cosh^{-1}[C_2(y - a)] = x + C_3\]where \(C_3\) is another constant of integration.
Solving for \(y\):
\[C_2(y - a) = \cosh[C_2(x + C_3)]\]\[y = \frac{1}{C_2}\cosh[C_2(x + C_3)] + a\]The three constants \(C_1\), \(C_2\), and \(C_3\) that appeared during our integration have clear physical meanings:
- \(C_1\): The first integration constant from separating variables in the energy equation
- \(C_2\): Related to the curvature and “tightness” of the catenary (\(C_2 = e^{C_1}\))
- \(C_3\): Determines the horizontal position of the catenary’s vertex (lowest point)
These constants are determined by the boundary conditions of the specific problem (the positions where the chain is attached).
The Catenary Solution
With appropriate choice of coordinate system and constants, our general solution is:
\[y = \frac{1}{C_2}\cosh[C_2(x + C_3)] + a\]It is cleaner to rename constants to avoid confusion with the traditional catenary parameter. Let
- \(A := 1/C_2\) (a length scale),
- \(x_0 := -C_3\), and
- \(y_0 := a\). Then \[y = A\,\cosh\!\left(\frac{x - x_0}{A}\right) + y_0.\]
This is the standard catenary form. The lowest point (vertex) is at \((x_0,\, y_0 + A)\), since \(\cosh\) attains its minimum value 1 at zero argument. If we choose coordinates so that the vertex is at the origin, set \(x_0 = 0\) and \(y_0 = -A\), which yields
\[y = A\cosh\!\left(\frac{x}{A}\right).\]In many references, the parameter is denoted by \(a\) instead of \(A\), giving the familiar
\[\boxed{y = a\,\cosh\!\left(\frac{x - x_0}{a}\right) + y_0,}\]where \(a\) is the shape parameter that determines the curvature of the catenary.
Solving for \(a\) from \(L\) and \(x_0\)
In practice, we often know the physical parameters of our catenary problem:
- The span between supports: \(2x_0\) (distance between the two attachment points)
- The total length of the chain or cable: \(L\)
From these, we need to determine the catenary parameter \(a\), which characterizes the shape of the curve.
For a symmetric catenary with vertex at the origin, our solution is \(y = a\cosh(x/a)\). Let’s establish two key relationships.
The sag \(h\) is the vertical distance from the support level down to the lowest point (vertex) of the chain. To find this:
- Height at vertex (\(x = 0\)): \(y(0) = a\cosh(0) = a\)
- Height at support (\(x = x_0\)): \(y(x_0) = a\cosh(x_0/a)\)
Since the sag is the difference between these heights:
\[h = a\cosh\!\left(\frac{x_0}{a}\right) - a = a\left[\cosh\!\left(\frac{x_0}{a}\right) - 1\right]\]The total length \(L\) of the catenary is found by integrating the arc length element. For our symmetric catenary from \(x = -x_0\) to \(x = x_0\):
\[L = \int_{-x_0}^{x_0} \sqrt{1 + (y')^2} \, dx\]Since \(y = a\cosh(x/a)\), we have \(y' = \sinh(x/a)\), so:
\[\sqrt{1 + (y')^2} = \sqrt{1 + \sinh^2(x/a)} = \sqrt{\cosh^2(x/a)} = \cosh(x/a)\]Therefore:
\[L = \int_{-x_0}^{x_0} \cosh\!\left(\frac{x}{a}\right) dx = a\left[\sinh\!\left(\frac{x}{a}\right)\right]_{-x_0}^{x_0}\]\[L = a\left[\sinh\!\left(\frac{x_0}{a}\right) - \sinh\!\left(\frac{-x_0}{a}\right)\right] = a\left[\sinh\!\left(\frac{x_0}{a}\right) + \sinh\!\left(\frac{x_0}{a}\right)\right]\]\[\boxed{L = 2a\sinh\!\left(\frac{x_0}{a}\right)}\]Now we have our two fundamental relationships connecting \(L\), \(h\), \(a\), and \(x_0\). In most practical problems, we know \(L\) and \(x_0\), and need to find \(a\). This requires solving a transcendental equation.
From the second equation above, we get:
\[\frac{L}{2a} = \sinh\!\left(\frac{x_0}{a}\right)\]Let’s introduce the dimensionless parameters:
\[\lambda = \frac{L}{2x_0} \quad \text{and} \quad \mu = \frac{a}{x_0}\]Here, \(\lambda\) represents the ratio of the chain length to the span, while \(\mu\) is the ratio of the catenary parameter to the half-span. The equation becomes:
\[\frac{\lambda}{\mu} = \sinh\!\left(\frac{1}{\mu}\right)\]This is a transcendental equation that cannot be solved algebraically for \(\mu\) in terms of \(\lambda\). Instead, we must use numerical methods to find \(\mu\) for a given value of \(\lambda\).
For a given \(\lambda > 1\) (since the chain length must exceed the span), we can solve for \(\mu\) using any of these approaches:
-
Newton-Raphson method: Define \(f(\mu) = \sinh\!\left(\frac{1}{\mu}\right) - \frac{\lambda}{\mu}\) and iterate using:
\[\mu_{n+1} = \mu_n - \frac{f(\mu_n)}{f'(\mu_n)}\]where \(f'(\mu) = -\frac{1}{\mu^2}\cosh\!\left(\frac{1}{\mu}\right) + \frac{\lambda}{\mu^2}\)
-
Bisection method: Since \(f(\mu)\) changes sign between suitable intervals, we can use bisection to converge to the root.
-
Fixed-point iteration: Rearrange to \(\mu = \frac{\lambda}{\sinh(1/\mu)}\) and iterate from an initial guess.
The solution exhibits interesting behaviors:
- As \(\lambda \to 1\) (chain length approaches span), \(\mu \to 0\) and the catenary becomes very taut and flat.
- As \(\lambda\) increases, \(\mu\) increases, resulting in a more pronounced sag.
- For very large \(\lambda\), the chain forms deep loops with most of its length hanging vertically.
Once we have determined \(a\) (or \(\mu\)), we can compute the sag \(h\) using:
\[h = a\left[\cosh\!\left(\frac{x_0}{a}\right) - 1\right] = a\left[\cosh\!\left(\frac{1}{\mu}\right) - 1\right]\]Parabolic Approximation to the Catenary
For many practical applications, especially when the sag is small compared to the span, a catenary can be closely approximated by a parabola. Let’s find the equation of the parabola that best matches our catenary.
For a catenary with vertex at the origin, we have:
\[y = a\cosh\left(\frac{x}{a}\right)\]To find the parabolic approximation, we’ll use the Taylor series expansion of \(\cosh(u)\) around \(u = 0\):
\[\cosh(u) = 1 + \frac{u^2}{2!} + \frac{u^4}{4!} + \frac{u^6}{6!} + \cdots\]For our catenary:
\[y = a\left(1 + \frac{1}{2}\left(\frac{x}{a}\right)^2 + \frac{1}{24}\left(\frac{x}{a}\right)^4 + \cdots\right)\]\[y = a + \frac{x^2}{2a} + \frac{x^4}{24a^3} + \cdots\]For small values of \(x/a\), the dominant terms are the constant and quadratic terms. Dropping the higher-order terms, we get the parabolic approximation:
\[y \approx a + \frac{x^2}{2a}\]This can be rewritten in standard parabolic form as:
\[\boxed{y = \frac{x^2}{2a} + a}\]where \(a\) is the vertical offset.
This solution demonstrates the power of the calculus of variations and Euler-Lagrange equations in solving problems involving optimization under constraints.